
© KREMFORD PTY. LTD. Stepper Motors, Stepper Motor Controllers, Hyperdrive
Web Site by VP-IT
| Stepping Motors Melbourne | Stepping Motors | Stepper Motors | MDrive | Liberty Drive | Actuator | Rotary | Gear Motors | Gearboxes | Panel Mount | PCB Mount |

Telephone: 03 9017 0473

1st Floor, 175 Collins Street, Melbourne, Victoria 3000 Australia

Main Telephone
(03) 9017 0473
ABN 79 137 904 235






- Novanta IMS Products
- Novanta IMS Liberty Drive
- Novanta IMS MDrive Linear Actuators
- Novanta IMS MDrive Plus Rotary
- Novanta IMS MDrive Hybrid Rotary
- Novanta IMS Stepping Motors
- Novanta IMS Stepping Motors With Encoders
- Novanta IMS Panel Mounted Drivers
- Novanta IMS PCB-Mounted Discrete Drivers
- Kremford Ready To Use Stepper Motor Hobby Kit
- Kremford Hyperdrive-3 Programmable Stepper Motor Controller
- Kremford Hyperdrive10 High Power Stepper Motor Controller








Kremford Products
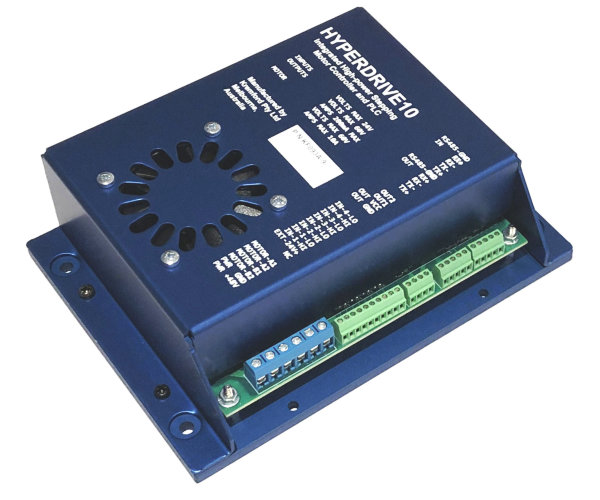
The Hyperdrive10 High Power Stepper Motor Controller
The Hyperdrive10 controller shown in Figure 1 contains a dedicated, high performance, high power, bipolar stepper motor controller interfaced to a 32-bit Arm microprocessor configured with both 4-wire RS485 and USB Modbus interfaces. The controller has been designed to provide high-power stepper motor control for applications requiring up to 72 volts and up to 10 amps. It provides four isolated high speed 24V inputs and two high current isolated 60V switching outputs. The USB Modbus interface could provide easy IOT access via standard ethernet to USB adapters. The screw connectors provide the 48V power and bipolar stepper motor connections, the 4 input connections, the 2 output connections, and the in and out 4-wire RS485 connections. The USB connector is mounted inside on the PCB but externally accessible. All inputs and outputs and the RS485 interface are electrically isolated. An internal 8-position switch allows for several possible software configurations. Three of these switches are dedicated to defining the controller’s Modbus address with the remaining switches available for special configurations. In a multi-motor machine using several Hyperdrive10 controllers, one controller can be specified as the master, and up to six other controllers slaved to that motor for speed, with an option to exactly match the master motor accel and decel rates regardless of individual speed settings. Controllers in such a system can include speed ratios and fine speed offsets to provide for gearing and fine master speed synchronisation. There are many control parameters configurable via Modbus registers. They are therefore accessible for either monitoring or modification by a Human Machine Interface (HMI) using RS485 or a control computer system using USB or ethernet. The various configurable parameters include defining I/O low- or high-going inputs, input debounce times, and several timer functions to set responses triggered by input events. Nearly all the motor parameters are available for configuration. These include speed, accel and decel rates along with stopped, accel, decel and running power settings. Various limits can be set including what level of micro-stepping is used and at what speed the motor switches from micro-stepping to full-step to maintain high-speed torque. All the Modbus settings that must survive a power loss such as modes and accelerations are backed up within the controller and are automatically restored when power is restored. Ancillary controls monitor the input power and control voltages and the controller temperature, and these are available via read-only Modbus registers. Control for a fan is provided for applications requiring particularly high powers or where the controller must function in a high temperature environment. The fan is temperature controlled, so in most situations will not run continuously. The control software is written to emulate the typical functions available on most PLC controllers, and so can be quickly configured to a customer’s particular motor control regime due to the number of inputs, outputs, internal timers, motor configurations and Modbus responses available. Of particular interest is the fact Kremford can provide controller software modifications to suit customer requirements. We can also provide HMI design both for an individual controller and for a set of controllers in a particular machine.
Download Hyperdrive10 User Manual
(.pdf format)

Contact us to find out how we can help bring your idea to reality...
For Hyperdrive sales queries, please contact:
Kieran Harford
Telephone: 0400 830 039
Email:
For Hyperdrive support queries, please contact:
Ron Kreymborg
Telephone: 0410 448 864
Email:


(including GST & postage anywhere
in Australia with tracking number)
Part number KF086D
Price: $1390.00
Click to enlarge